Тема 9. Перетворення сигналів в нелінійних електронних колах
| Сайт: | Освітній сайт КНУБА |
| Курс: | Основи теор. кіл, сигнали та проц. в електроніці (Ковал) |
| Книга: | Тема 9. Перетворення сигналів в нелінійних електронних колах |
| Надрукував: | Гість-користувач |
| Дата: | четвер, 30 липня 2026, 10:07 |
Опис
1. Перетворення частоти в нелінійних
електронних колах
2. Стабілізація напруги
та струму
3. Випрямлення зміного
струму
4. Модуляція і
детектування
4.2. Амплітудні
модулятори
4.3. Частотні і
фазові модулятори
4.4. Амплітудні
детектори
4.5. Частотні і фазові
детектори
5. Генерування
гармонічних сигналів
5.2. LC-автогенератори
5.3. RC-автогенератори
4.1. Принципи побудови перетворювачів спектра
5.1. Основні поняття про принципи побудови автогенераторів
1. Перетворення частоти в нелінійних електронних колах
Частотні перетворення у нелінійних електронних колах зумовлені нелінійною залежністю між струмами та напругами нелінійних компонент кола. Для прикладу розглянемо нелінійний резистор, вольтамперну характеристику якого у загальному випадку запишемо так:
 . (5.22)
. (5.22)
Якщо прикладена до резистора напруга має синусоїдний характер з частотою , то струм визначається формулою
 , (5.23)
, (5.23)
тобто він зберігає періодичність, але його форма буде відрізнятись від гармонічної.
У результаті цього відповідний спектр може містити складові з частотами  . Виділивши із
спектра струму гармоніку із заданим значенням k частотною фільтрацією досягаємо помноження частоти на ціле число k.
. Виділивши із
спектра струму гармоніку із заданим значенням k частотною фільтрацією досягаємо помноження частоти на ціле число k.
Ще різноманітніший спектр струму у нелінійному резисторі отримується , якщо до нього прикласти напругу, що у спектрі якої дві частоти
 (5.24)
(5.24)
У такому разі, розклавши функцію f(U) у ряд Тейлора
 (5.25)
(5.25)
і використавши формули піднесення до степеня суми, а також виконавши певні тригонометричні перетворення, бачимо, що спектр струму містить гармоніки, частоти яких визначаються співвідношенням:
Види перетворення частоти:
- помноження частоти;
- утворення комбінаційних частот;
- зміщення спектра сигнала.
 (5.26)
(5.26)
Зауважимо, що частоти, визначені формулою (5.26), називаються комбінаційними, а саме їхнє утворення називаємо змішуванням частоти. Останній процес має важливе практичне застосування, окремий випадок якого буде розглянутий нижче.
Зауважимо, що як нелінійний елемент може використовуватись не тільки резистор, а й конденсатор чи котушка індуктивності.
Окремий випадок перетворення частоти полягає у зміщенні спектра сигналу вздовж шкали частоти у бік вищих або нижчих частот за умови збереження співвідношень між амплітудами та фазами спектральних складових сигналу. Таке перетворення частоти реалізують на підставі принципу гетеродинування, тобто перемноження сигналу на допоміжне гармонічне коливання, що утворюється допоміжним генератором-гетеродином.
Пояснимо сказане на прикладі перетворення частоти амплітудно-модульованого сигналу, спектр якого складається у простішому випадку із трьох спектральних складових:
 (5.27)
(5.27)
де Am0, w0, j0 – відповідно амплітуда, частота та початкова фаза несучого коливання; W, F – частота та початкова фаза модулюючого гармонічного коливання; М – коефіцієнт модуляції.
Приймемо, що гетеродин генерує коливання
sг(t)=Amгcos(wгt). (5.28)
Після перемноження АМ-сигналу на коливання гетеродина отримуємо шість спектральних складових:
 (5.29)
(5.29)


Перші три складові утворюють у сумі АМ-сигнал, спектр якого зміщений стосовно спектра первинного АМ-сигналу в бік вищих частот на величину wг, а інші три складові теж утворюють АМ-сигнал, спектр якого зміщений стосовно спектра первинного АМ-сигналу в бік нижчих частот на величину wг. Значення амплітуди гетеродина Амг відіграє роль коефіцієнта пропорційності, на який множаться амплітуди всіх складових. Співвідношення між фазами складових спектра теж зберігається. Зауважимо, що спектральні складові з сумарними та різницевими частотами типу w1±w2±w3+... називають комбінаційними складовими.
Із сказаного випливає, що для побудови амплітудного спектра коливання (5.29) необхідно змістити спектр первинного АМ-сигналу вздовж осі частот на величину wг один раз в бік вищих частот і один раз – в бік нижчих частот, як показано на рис.5.11.
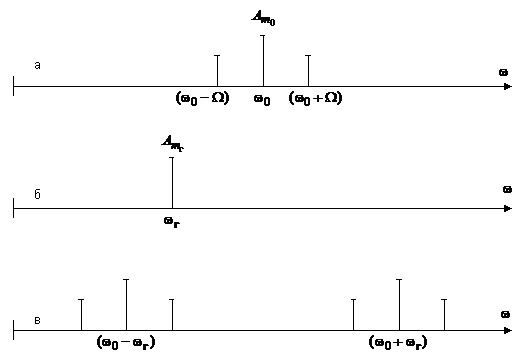
Рис. 5.11. Принцип перетворення частоти.
а – спектр первинного АМ-сигналу, б – спектр коливання гетеродина,
в – спектр добутку АМ-сигналу та коливання гетеродина
Отже, результатом перемноження sАМ(t) і sг(t) є два спектри, рознесені по частоті на величину 2wг. Залежно від того, в бік яких частот потрібно змістити спектр первинного сигналу, виділяють за допомогою смугового фільтра один із спектрів, а інший відсіюють.
Такий перетворювач частоти складається з основних функціональних вузлів:
а) генератора гармонічних коливань (гетеродина), частоту якого можна змінювати для зміщення спектра вхідного сигналу на потрібну величину;
б) перемножувача, який реалізує функцію перемноження вхідного сигналу sвх(t) і коливання гетеродина sг((t);
в) частотного фільтра, який виділяє спектр сигналу з перетвореними частотами.
Структурна схема перетворювача частоти показана на рис.5.12.
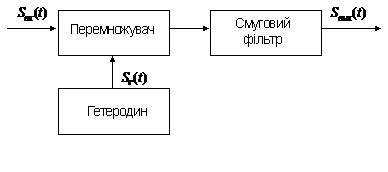
Рис.5.12. Структурна схема перетворювача частоти
Функцію перемножувача можуть виконувати нелінійні елементи (транзистори, напівпровідникові діоди, електронні лампи) або спеціальні операційні підсилювачі, виконані у вигляді мікросхем.
Існує оптимальне значення амплітуди гетеродина, яке забезпечує максимум відношення сигнал/шум.
Зауважимо, що перетворення частоти часто супроводжується нелінійними спотвореннями, результатом яких є поява паразитних (небажаних) спектральних складових, котрі потрібно відсіювати за допомогою частотних фільтрів.
Основним параметром перетворювача частоти є крутість перетворення sп, яка визначається як відношення амплітуди корисної спектральної складової вихідного струму перемножувача до амплітуди вхідного сигналу.
Наприклад, якщо перетворювач перетворює гармонічну напругу з частотою fвх=100 кГц на гармонічну напругу з частотою fвих=465 кГц, причому амплітуда вхідної напруги Umвх=100 мВ, амплітуда спектральної складової струму перемножувача з частотою 465 кГц дорівнює 5 мА, то крутість перетворення дорівнює Sп=50 мА/В.
Основне завдання стабілізаторів напруги та струму – зменшення негативного впливу зовнішніх чинників та процесів старіння елементів на параметри та характеристики електронних кіл .
Крутість перетворення пропорційна до амплітуди гетеродина, проте значне збільшення амплітуди гетеродина призводить до збільшення кількості паразитних спектральних складових, які відіграють роль шуму і ускладнюють виділення корисних спектральних складових. Тому у кожному конкретному випадку значення амплітуди гетеродина вибирають індивідуально.
2. Стабілізація напруги та струму
Нестабільність джерел живлення, коливання температури, зміна вологості навколишнього середовища, старіння елементів та інші чинники є причинами зміни параметрів та характеристик функціональних вузлів електронної апаратури. Зменшення негативного впливу перелічених чинників досягають, з одного боку, ізоляцією функціональних вузлів від навколишнього середовища (наприклад, поміщаючи їх у спеціальні камери з стабільною температурою – термостати), а з іншого боку – застосуванням стабілізаторів напруги та струму. Стабілізатори описують відповідними параметрами. Проілюструємо сказане на прикладі стабілізаторів напруги.
Стабілізатором напруги називають електронну схему (прохідний чотириполюсник), номінальна напруга на виході якого Uвих підтримується практично незмінною за заданих допустимих відхилень від номінальних значень напруги Uвх на вході стабілізатора, струму Івих (чи опору навантаження Rн) на виході стабілізатора, а також температури Т навколишнього середовища.
Отже вихідна напруга стабілізатора залежить від перелічених чинників, тобто Uвих=f(Uвх, Івих, Т).
Приріст напруги DUвих на виході стабілізатора з урахуванням цієї залежності опишемо співвідношенням:
 (5.30)
(5.30)
Частинні похідні у (5.30) при малих приростах величин DUвх, DІвих, DТ мають такий фізичний зміст:
 – коефіцієнт передавання пульсації вхідної
напруги, якщо Івих=const,
T= const;
– коефіцієнт передавання пульсації вхідної
напруги, якщо Івих=const,
T= const;
 – внутрішній опір стабілізатора, якщо Uвх=
const; T= const;
– внутрішній опір стабілізатора, якщо Uвх=
const; T= const;
 – температурний коефіцієнт нестабільності
вихідної напруги, якщо Uвх=
const; Івих= const.
– температурний коефіцієнт нестабільності
вихідної напруги, якщо Uвх=
const; Івих= const.
Ці параметри дають змогу сформувати основні характеристики стабілізаторів напруги, які використовують для розрахунку та порівняння різних типів стабілізаторів.
Стабілізатором струму називають електронну схему, яка забезпечує практично стабільний струм Івих в опорі навантаження Rн за допустимих змін напруги Uвх на вході стабілізатора, опору навантаження Rн та температури Т навколишнього середовища.
Отже, Івих=f(Uвх, Rн, Т). Використовуючи цю залежність, можна визначити параметри стабілізатора струму, як і у випадку стабілізатора напруги.
Важливим параметром стабілізаторів напруги та струму є коефіцієнт корисної дії (ККД), який числово дорівнює відношенню потужності на виході стабілізатора до споживаної ним потужності на вході від джерела живлення:
Регулюючий елемент – обов’язковий елемент схеми стабілізатора напруги (струму).
h=Рвих/Рвх=(UвихІвих)/(Uвх Івх). (5.31)
Найпоширеніші стабілізатори напруги, тому далі переважно розглядатимемо саме їх.
Обов’язковим елементом схеми стабілізатора є регулюючий елемент (РЕ), який призначений для керування вихідною напругою (струмом) стабілізатора.
Залежно від призначення, способу під’єднання та режиму роботи регулюючого елемента, наявності чи відсутності зворотного зв’язку стабілізатори поділяють на такі типи:
– стабілізатори змінної та постійної напруги;
– послідовні та паралельні стабілізатори;
– стабілізатори неперервної та імпульсної дії.
– стабілізатори параметричного та компенсаційного типу.
Стабілізатори змінної напруги призначені для забезпечення на опорі навантаження змінної напруги заданої форми зі стабільними параметрами (наприклад, гармонічної напруги з стабільною амплітудою). Стабілізатори постійної напруги підтримують на виході постійну за величиною та полярністю напругу.
Послідовні та паралельні стабілізатори відрізняються способом під’єднання регулюючого елемента до опору навантаження (рис.5.13)
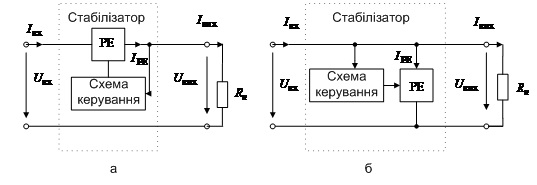
Рис.5.13. Структурні схеми послідовного (а) та паралельного (б)
стабілізаторів напруги
Коефіцієнт стабілізації показує, у скільки разів зміна вихідної величини є меншою за зміну вхідної величини, що стабілізується.
У схемі послідовного стабілізатора (рис.5.13, а) за умови малого споживання струму схемою керування виконується співвідношення: Івих»ІРЕ ≈Івх. . Тому, як випливає з (5.31), ККД навантаженого стабілізатора прямує до значення h»Uвих/Uвх. Якщо ж навантаження відсутнє (Івих=0), то ККД прямує до 1.
У схемі паралельного стабілізатора (рис.5.13, б) надлишковий струм, створений у вхідому джерелі живлення, відгалужується у РЕ. Тому за умови малого споживання струму схемою керування можемо записати: Івих»Івх - ІРЕ. Внаслідок цього, як бачимо із (5.31), ККД навантаженого стабілізатора . (Uвих»Uвх) прямує до значення h»1 - ІРЕ/Івх. У разі відсутності навантаження (Івих=0, ІРЕ=Івх) ККД прямує до нуля.
Зауважимо, що в схемі послідовного стабілізатора треба передбачати кола захисту РЕ від короткого замикання на виході, бо тоді вся споживана стабілізатором потужність виділяється на РЕ, що може призвести до його перегрівання і виходу з ладу. Паралельний стабілізатор позбавлений цього недоліку.
У стабілізаторах неперервної дії струм через РЕ протікає неперервно. Тому ККД таких стабілізаторів є низьким (h=0,5...0,7).
Принцип дії імпульсних стабілізаторів ґрунтується на періодичному (з періодом Т) під’єднанні на час Т1 до джерела живлення з напругою Е і від’єднанні на час Т-Т1. При цьому РЕ працює у ключовому режимі і струм через нього протікає лише протягом інтервалу Т1. Внаслідок цього постійна складова напруги на навантаженні дорівнює: U0вих=ЕТ1/Т і її можна регулювати зміною співвідношення Т1/Т. ККД таких стабілізаторів сягає значень h=0,85...0,95. Недоліком таких стабілізаторів є значні пульсації вихідної напруги, для усунення яких вмикають у схему стабілізатора фільтр нижніх частот між ключем і навантаженням і використовують достатньо високу (десятки кГц) частоту перемикання ключа.
У стабілізаторах параметричного типу стабілізація здійснюється завдяки використанню як РЕ нелінійних компонентів з відповідними вольтамперними характеристиками (ВАХ) – кремнієвих стабілітронів, газових стабілітронів, транзисторів, баретерів тощо. Спосіб увімкнення нелінійного елемента у схему стабілізатора залежить від типу його ВАХ. На рис. 5.14 зображено два типи ВАХ: увігнута (І) та опукла (ІІ).
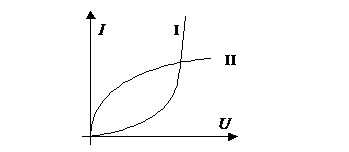
Рис.5.14. Типи ВАХ нелінійних елементів:
І – увігнута, ІІ – опукла
Обидва типи нелінійних елементів істотно відрізняються значеннями динамічних опорів Rд: у першого типу динамічний опір RдІ дуже малий, а у другого RдІІ– дуже великий. Тому нелінійний елемент першого типу вмикають паралельно до опору навантаження (рис.5.15, а), а нелінійний елемент другого типу – послідовно з опором навантаження (рис.5.15, б).
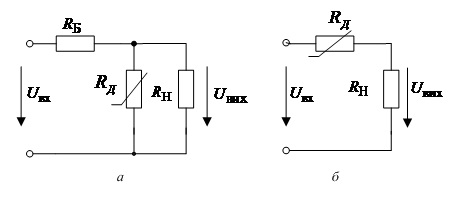
Рис.5.15. Способи вмикання нелінійних елементів у схему
стабілізатора параметричного типу
Для забезпечення високих значень коефіцієнта стабілізації значення параметрів елементів повинні задовольняти умови:
– для
схеми рис.5.15, а:
– для схеми рис.5.15, б: Rд>Rн
У разі виконання наведених умов відхилення вхідної напруги від номінального значення падатимуть відповідно на баластному опорі RБ та на RДП, а вихідна напруга Uвих практично не змінюватиметься.
Основним недоліком стабілізаторів параметричного типу є низький ККД та недостатньо високий коефіцієнт стабілізації, неможливість плавного регулювання значення стабілізованої напруги чи струму, мала вихідна потужність
Стабілізатори
компенсаційного типу являють собою електронні схеми з від’ємним зворотним
зв’язком, який виконує функцію автоматичного регулювання опору РЕ. У ролі РЕ
тут застосовують електронні компоненти, опір яких автоматично змінюється під
дією сигналу схеми керування. Такими компонентами слугують транзистори,
електровакуумні лампи тощо. Сигнал керування являє собою підсилену у К разів
різницю ![]() між вихідною напругою стабілізатора Uвих та еталонною (опорною)
напругою UОП. Сказане
ілюструє рис.5.16, на якому показано функціональні схеми компенсаційних
стабілізаторів напруги послідовного та паралельного типів.
між вихідною напругою стабілізатора Uвих та еталонною (опорною)
напругою UОП. Сказане
ілюструє рис.5.16, на якому показано функціональні схеми компенсаційних
стабілізаторів напруги послідовного та паралельного типів.
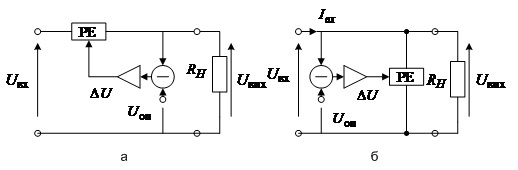
Рис.5.16. Функціональні схеми компенсаційних стабілізаторів:
а – послідовного типу; б –
паралельного типу
Використання у стабілізаторах компенсаційного типу стабільних джерел опорної напруги та підсилювальних елементів з великим коефіцієнтом підсилення забезпечує високу стабільність вихідної напруги, дає змогу плавно регулювати вихідну напругу.
Для послаблення впливу температури навколишнього середовища вмикають в схему стабілізатора термочутливі елементи (терморезистори), які змінюють свій опір залежно від зміни температури навколишього середовища. Увімкнення таких елементів у коло зворотного зв’язку дає змогу компенсувати зміну вихідної напруги стабілізатора від зміни температури.
3. Випрямлення зміного струму
Випрямленням змінного струму називають перетворення змінної (гармонічної) напруги промислової частоти 50 Гц на постійну напругу. Реалізує функцію випрямлення електронне коло, яке називають випрямлячем.
Однопівперіодний випрямляч зумовлює нерівномірне навантаження джерела змінної напруги.
Схема випрямляча складається з таких основних елементів: трансформатора, випрямних елементів (діода або декількох діодів) і згладжувального фільтра.
Трансформатор змінює діюче значення змінної напруги мережі на змінну напругу, величина якої відповідає заданій величині постійної напруги на виході випрямляча.
Випрямні елементи можуть проводити струм лише в одному напрямі і, отже, перетворюють змінну напругу на пульсуючу.
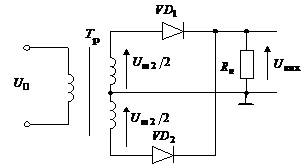
Згладжувальний фільтр призначений для зменшення пульсацій вихідної напруги до допустимого значення. Найпростішою є однопівперіодна схема випрямляча (рис.5.17, а).
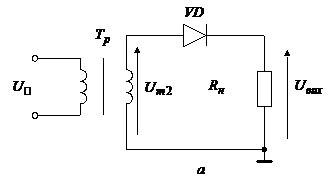
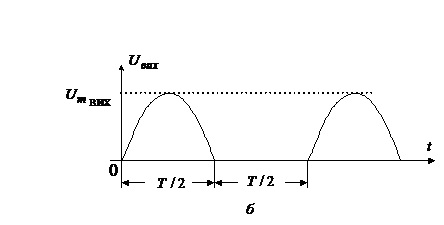
Рис.5.17. Схема однопівперіодного випрямляча (а)
та часова діаграма його вихідної напруги (б)
Упродовж додатних півперіодів вхідної напруги (коли діод відкритий) вихідна напруга повторює форму напруги на вторинній обмотці трансформатора, а протягом від’ємних півперіодів діод закритий і не пропускає струму, тому вихідна напруга дорівнює нулеві (див. рис.5.17, б). Частота пульсацій вихідної напруги однопівперіодної схеми дорівнює частоті мережі f, а сама вихідна напруга містить постійну складову та ряд гармонічних складових з частотами f, 2f, 3f і т.д.
Таку схему застосовують при малих струмах і невисоких вимогах стосовно фільтрації вихідної напруги.
Недоліком однопівперіодної схеми є наявність постійного підмагнічування трансформатора, що погіршує його параметри.
Ефективнішими у плані випрямлення змінного струму є двопівперіодна та мостова схеми випрямляча.
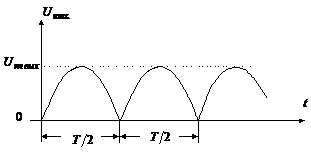
У двопівперіодній схеми випрямляча (рис.5.18, а) діоди відкриваються по черзі у різні половини періоду вхідної напруги. Наприклад, у додатний півперіод вхідної напруги VD1 відкривається і пропускає струм, а діод VD2 у цей час закритий. Під час дії від’ємного півперіоду відкривається VD2, а VD1 закривається. В результаті через опір навантаження струм протікає під час обох півперіодів в одному і тому самому напрямі. Тому вихідна напруга має пульсуючий характер (рис.5,18, б), але, на відміну від однопівперіодної схеми, частота пульсацій дорівнює 2f.
а
б
Рис.5.18. Схема двоперіодного випрямляча (а)
та часова діаграма його вихідної напруги (б)
Постійна складова U0 вихідної напруги у два рази більша, ніж в однопівперіодній схемі.
Частота пульсацій на виході двопівперіодного випрямляча більша удвічі за частоту вхідної напруги.
Найчастіше застосовують мостову схему випрямляча (рис.5.19), перевагою якої порівняно з двопівперіодною схемою є те, що у вторинній обмотці трансформатора немає виводу від середньої точки, тому виготовляти такий трансформатор технологічно простіше. У мостовій схемі (рис.5.19) діоди попарно відкриваються протягом різних півперіодів. Наприклад, при додатній півхвилі вхідної напруги відкриті діоди VD1 та VD2 (VD3 та VD4 в цей час закриті), а в наступний півперіод відкриваються VD3 та VD4, а VD1 та VD2 закриваються. Часова діаграма вихідної напруги така сама, як і у двопівперіодній схемі (рис.5.19, б).
Перевагами двопівперіодної та мостової схем порівняно з однопівперіодною схемою є відсутність постійого підмагнічування трансформатора, а також кращі умови фільтрації вихідної напруги, оскільки частота пульсацій удвічі вища, ніж у однопівперіодної схеми.
Згладжувальні фільтри випрямлячів вмикають між випрямними елементами та опором навантаження, як показано для мостової схеми.
Коефіцієнт пульсацій є відношенням діючого значення змінних складових напруги на виході випрямляча до величини її постійної складової.
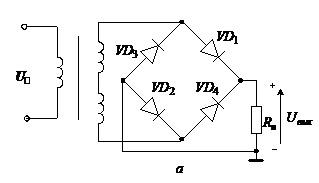
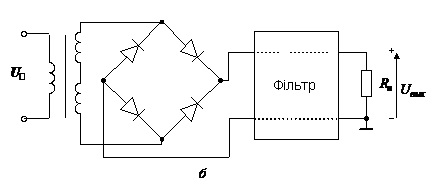
Рис.5.19. Мостова схема випрямляча (а), схема із зглажувальним фільтром (б)
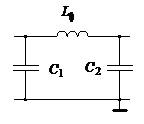
Рис.5.20. П-подібна схема згладжувального LC-фільтра
Основне завдання згладжувального фільтра – максимальне зменшення змінної складової та мінімальне зменшення постійної складової випрямленої напруги, яка подається на вхід фільтра. Найпростішими згладжувальними фільтрами є такі, які складаються або з одної котушки індуктивності, увімкнутої послідовно з опором навантаження, або з одної ємності, увімкнутої паралельно з опором навантаження.
Часто застосовують П-подібні LC-фільтри (рис.5.20), які дають змогу зменшити пульсації випрямленої напруги до значень, які не перевищують 1 %. Значення параметрів елементів можуть бути значними (одиниці – десятки Генрі, сотні – тисячі мікрофарад).
Основними параметрами випрямлячів є:
– номінальне значення випрямленої напруги Uвих.ном;
– номінальний струм навантаження Івих.ном;
– номінальна напруга мережі живлення Uвх.ном;
– допустима напруга пульсації та виході випрямляча Uп або коефіцієнт пульсації Кп=Uп/Uвих.ном;
– вихідна потужність Рвих=Uвих.ном х Івих.ном.
Поява нових складових у спектрі вихідного сигналу порівняно зі спектром вхідного сигналу можлива лише при нелінійному перетворенні сигналу.
Основним параметром згладжувального фільтра є коефіцієнт згладжування, який дорівнює відношенню коефіцієнта пульсацій на вході фільтра до коефіцієнта пульсацій на виході фільтра: Кзгл=Кп.вх/Кп.вих.
4. Модуляція і детектування
4.1. Принципи побудови перетворювачів спектра
4.2. Амплітудні
модулятори
4.3. Частотні і
фазові модулятори
4.4. Амплітудні
детектори
4.5. Частотні і фазові
детектори
4.1. Принципи побудови перетворювачів спектра
Процеси модуляції, перетворення частоти, детектування модульованих сигналів, випрямлення змінного струму, генерування коливань, які здійснюються в електронних колах, пов’язані з перетворенням спектрів сигналів.
Більшість перетворювачів спектра являють собою поєднання нелінійних перетворювачів та лінійних частотовибірних кіл (рис.5.21).

Рис.5.21. Узагальнена структурна схема перетворювача спектра
Нелінійний перетворювач перетворює спектр вхідного сигналу sвх(t) так, що спектр сигналу sн(t) на його виході містить нові спектральні складові.
Лінійне частотовибірне коло виділяє із спектра сигналу sн(t) на виході нелінійного перетворювача корисні (потрібні) спектральні складові і передає їх на вихід у вигляді сигналу sвих(t). Отже, лінійне частотовибірне коло виконує функції частотного фільтра.
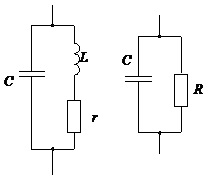
Найчастіше як фільтр використовують або високодобротне коливальне коло, або RC-ланку (рис.5.22).
|
а |
б |
Рис.5.22. Лінійні частотновибірні кола.
а – коливальне коло як смуговий фільтр; б – RC-ланка
як фільтр низьких частот
Коливальне коло виконує роль смугового фільтра і його застосовують для виділення певної смуги частот у високочастотному діапазоні. Модуль комплексного опору коливального кола описує вираз:
 (5.32)
(5.32)
де R0=L/Cr– резонансний опір кола;
e=(w/w0-w0/w)Q – узагальнене розстроєння;
w0, Q – відповідно резонансна частота та добротність кола.
Із (5.32) випливає, що опір кола найбільший на резонансній частоті (e=0) і різко зменшується у разі відхилення частоти від резонансної. Очевидно, що чим більша добротність кола, тим різкіше зменшується його опір у разі відхилення від резонансної частоти. Тому при застосуванні коливального кола у схемі перетворювача спектра параметри LC-елементів вибирають так, щоб його резонансна частота збігалася з частотою корисного коливання. Опір кола для цієї частоти найбільший і тому напруга на колі буде найвищою. Для інших складових спектра опір кола незначний, і відповідно напруга на колі, утворена цими складовими, буде близькою до нуля.
RC-ланку застосовують у схемі перетворювача спектра тоді, коли корисною спектральною складовою є низькочастотна або постійна складова. Модуль комплексного опору такої ланки описує вираз:
 (5.33)
(5.33)
Для коливань високої частоти модуль опору істотно зменшується порівняно з опором R для постійної та низькочастотної складових спектра (внаслідок шунтувального впливу коденсатора), тому високочастотні складові не створять на ланці помітної напруги.
Як нелінійні перетворювачі можуть бути використані діоди, транзистори, нелінійні p-n – переходи (варикапи), а також окремі мікросхеми на основі диференціальних каскадів (ДК), та аналогових перемножувачів, що містять декілька взаємозв’язаних ДК. Застосування ДК як нелінійних перетворювачів дає змогу скоротити кількість типів використовуваних мікросхем та забезпечити високу однорідність структури перетворювачів спектра. Кращі зразки ДК мають граничні частоти, які сягають одиниць гігагерц, що дає можливість будувати на їхній основі перетворювачі спектра на частотах, які сягають сотень мегагерц. Тому далі переважно розглядатимемо перетворювачі спектра, побудовані на ДК.
Попередньо коротко розглянемо принцип роботи ДК та його властивості. На рис. 5.23 зображена схема ДК, який складається з двох однакових пліч, утворених відповідно транзисторами VT1 та VT2 з однаковими колекторними навантаженнями. Важливою вимогою є ідентичність параметрів елементів обох пліч, що забезпечує високу стабільність роботи і повну компенсацію температурного дрейфу.
Диференціальний транзисторний каскад є універсальним нелінійним перетворювачем, зручним для різноманітних частотних перетворень сигналів.
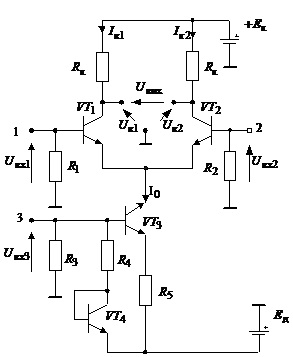
Рис.5.23. Схема диференціального каскаду з трьома входами
Вираз, що описує характеристику передавання напруги через ДК, яку можна використати для аналізу перетворення спектра, має такий вигляд:
 (5.34)
(5.34)
На підставі сказаного відзначимо такі властивості ДК:
1) нелінійний характер залежності вихідної напруги Uвих від сукупності вхідних сигналів UД дає змогу використати ДК як перетворювач спектра;
2) залежність вихідної напруги ДК від напруги Uвх3 можна використовувати для перемноження сигналів Uд та Uвх3. Ця властивість дає змогу будувати на основі ДК перемножувач сигналів та інші перетворювачі спектра;
3) характеристика передавання напруги ДК є лінійною лише для невеликих значень диференціального сигналу Uд.
Для подальшого аналізу використаємо макромодель ДК у вигляді нелінійного багатополюсника (рис.5.24).
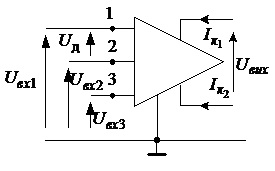
Рис.5.24. Макромодель диференційного каскаду
як нелінійного перетворювача спектра
4.2. Амплітудні модулятори
Вище зазначалось, що для здійснення амплітудної модуляції треба перемножити високочастотне несуче коливання та низькочастотний модулюючий сигнал, накладений на постійну складову:
 . (5.35)
. (5.35)
Отже, амплітудний модулятор реалізує математичну функцію перемноження двох згаданих коливань.
Амплітудні модулятори є найпростішими модуляторами сигналів.
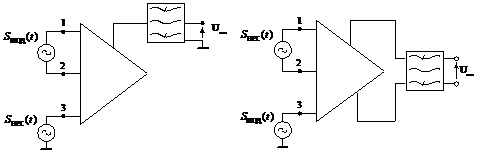
При побудові схеми амплітудного модулятора на основі ДК можливі два варіанти подання двох згаданих коливань на входи ДК:
а) несуче коливання подають як Uвх3, а модулюючий сигнал – на диференційний вхід (рис.5.25, а);
б) несуче коливання подають на диференційний вхід ДК, а модулюючий сигнал – на третій вхід (рис.5.25, б).
При обох варіантах подання вхідних напруг на ДК у спектрі колекторних струмів транзисторів VT1 та VT2 утворюються необхідні спектральні складові (з частотою несучого коливання та сумарні і різницеві комбінаційні складові), для виділення яких у схему модулятора вводять смуговий фільтр, настроєний на частоту несучого коливання w0, смуга пропускання якого дорівнює 2Wmax, де Wmax – максимальна частота у спектрі модулюючого сигналу.
|
а |
б |
Рис.5.25. Варіанти побудови схеми амплітудного модулятора на ДК
Основною характеристикою модулятора є статична модуляційна характеристика, яка являє собою залежність амплітуди складової колекторного струму транзистора з частотою несучого коливання Ікнес від постійного зміщення на керуючому вході ДК при постійній амплітуді несучого коливання на іншому вході ДК. Типовий вигляд статичної модуляційної характеристики показаний на рис.5.26. За малих значень амплітуди колекторного струму (Ікнес<Ікmin) та великих значень (Ікнес>Ікmax) модуляційна характеристика є нелінійною, що зумовлено, з одного боку, нелінійністю статичних вольтамперних характеристик транзисторів при малих струмах, а з іншого – явищем обмеження струму транзисторів.
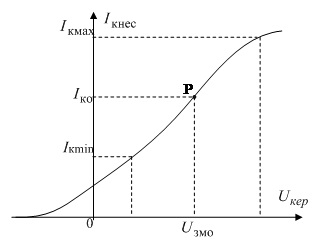
Рис.5.26. Статична модуляційна характеристика
Для того, щоб модулятор не вносив значних нелінійних спотворень, треба використовувати лише лінійну ділянку модуляційної характеристики. Для цього початкове зміщення Uзмо на керуючому вході вибирають таким, щоб початкова робоча точка P була розміщена посередині лінійної ділянки модуляційної характеристики (див.рис.5.26).
Статична модуляційна характеристика – основна характеристика модулятора.
Максимальне значення коефіцієнта модуляції, за якого ще не виникатимуть нелінійні спотворення, визначають на підставі статичної модуляційної характеристики за формулою:
 (5.36)
(5.36)
4.3. Частотні і фазові модулятори
Побудова частотного модулятора полягає у створенні такого генератора гармонічних коливань, частота генерування якого змінюється за законом зміни модулюючого сигналу. Принципи побудови автогенераторів гармонічних коливань розглянуто у наступному підрозділі. Тут розглянемо лише принцип здійснення частотної модуляції у діючому LC-автогенераторі, зважаючи на те, що частота коливань, генерованих автогенератором, дорівнює резонансній частоті коливального кола, використаного в автогенераторі, яка, своєю чергою, визначається параметрами реактивних елементів (конденсаторів та котушок індуктивності). Найчастіше для цієї мети застосовують варикапи, які являють собою закриті відповідним зміщенням р-n – переходи, бар’єрна ємність яких залежить від прикладеної напруги. На рис. 5.27 проілюстровано принцип здійснення частотної модуляції у схемі LC-автогенератора за допомогою варикапа Сv. Коливальне коло автогенератора утворюють котушка індуктивності Lк та послідовно з’єднані конденсатори С1 і варикап Сv. Елементи Lдр, Ср, R, Eзм відіграють допоміжну роль (забезпечують усунення небажаного впливу низькочастотного кола, в якому діє модулюючий сигнал sмод(t), на високочастотне вихідне коло та створюють необхідне зміщення на варикап.
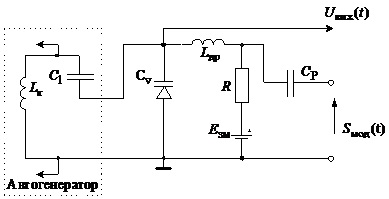
Рис.5.27. Здійснення частотної модуляції за допомогою варикапа
Частота генерованих коливань дорівнює:
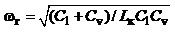 . (5.37)
. (5.37)
З виразу (5.37) видно, що частота wг нелінійно залежить від ємності варикапа Сv, проте при невеликих змінах цієї ємності (DСv/Cv<1) з певним наближенням можна прийняти:
 (5.38)
(5.38)
Отже,
у разі невеликих змін ![]() ємності варикапа під дією модулюючого сигналу
можна отримати пропорційну зміну частоти автогенератора
ємності варикапа під дією модулюючого сигналу
можна отримати пропорційну зміну частоти автогенератора ![]() .
.
Як керований реактивний елемент у схемах частотних модуляторів також часто використовують т.зв. “реактивний транзистор”, який являє собою транзисторний каскад з реактивним зворотним зв’язком, за якого опір транзистора між колектором та емітером має реактивний характер (зсув фаз між струмом та напругою близький до 900). Реактивного опір змінюють за допомогою напруги зміщення на базі транзистора. Під’єднавши реактивний транзистор до коливального кола автогенератора, змінюють резонансну частоту кола і, отже, здійснюють частотну модуляцію.
Реактивний транзистор, як і варикап, забезпечує здійснення частотної модуляції без спотворень лише за невеликих відносних значень девіації частоти.
Недоліком частотних модуляторів є те, що частотну модуляцію супроводжує паразитна амплітудна модуляція, яка виникає внаслідок зміни модуля комплексного опору коливального кола при зміні частоти генерації.
Для здійснення фазової модуляції треба побудувати схему, на виході якої фаза коливань змінюється пропорційно до модулюючого сигналу sмод(t) стосовно лінійного закону y(t)=w0t.
Серед багатьох способів здійснення фазової модуляції виділимо один, який ґрунтується на тому, що фазомодульовані коливання можна розглядати як модульовані по частоті за законом, пропорційним до похідної від модулюючого сигналу.
Звідси випливає, що для здійснення фазової модуляції можна використати частотний модулятор (ЧМ) спільно з диференціатором модулюючого сигналу Sмод(t), як показано на рис.5.28.
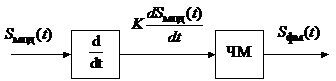
Рис.5.28. Здійснення фазової модуляції за допомогою частотного модулятора
У схемах фазових модуляторів теж з’являється паразитна амплітудна модуляція, для усунення якої на виході модуляторів вмикають амплітудні обмежувачі.
4.4. Амплітудні детектори
Детектування АМ-сигналів полягає у відновленні модулюючого сигналу Sмод(t), згідно з яким змінюється амплітуда модульованого сигналу. Детектування пов’язане з перетворенням спектра, яке полягає у створенні низькочастотних складових, котрих не було у спектрі АМ-сигналу.
Узагальнена структурна схема амплітудного детектора аналогічна схемі, зображеній на рис.5.21. На виході нелінійного перетворювача у спектрі сигналу Sн(t) поряд з іншими спектральними складовими утворюється постійна складова струму І0, величина якої залежить від амплітуди Am(t) модульованого вхідного сигналу SАМ(t). У разі зміни цієї амплітуди постійна складова складова струму І0 теж змінюватиметься з низькою частотою. На виході детектора вмикають фільтр низьких частот (рис. 5.22, б), на резисторі R якого низькочастотна складова струму створює вихідну напругу, а високочастотні складові практично закорочує малий опір конденсатора С. Очевидно, що для цього значення параметрів R і C фільтра треба підбирати так, щоб задовольнялись співвідношення:
![]() (5.39)
(5.39)
де w та W – відповідно значення високої та низької частот у спектрі перетвореного сигналу Sн(t) на виході нелінійного перетворювача.
Детектування АМ-сигналів здійснюється без нелінійних спотворень, якщо постійна складова струму І0 нелінійного перетворювача пропорційна до амплітуди Аm високочастотного сигналу, що діє на вході детектора. Залежність I0(Am) називають характеристикою детектування.
Як нелінійний елемент для реалізації амплітудного детектора зручно використовувати напівпровідниковий діод, В/А характеристика якого апроксимується квадратичною залежністю.
Найпростішим детектором є діодний детектор, в якому роль нелінійного перетворювача відіграє напівпровідниковий діод (рис.5.29).
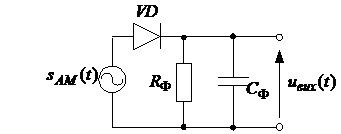
Рис.5.29. Схема діодного детектора АМ-сигналів
У разі слабких сигналів на вході детектора (Am<...0,2 B) вольтамперну характеристику (ВАХ) діода iд=f(uд)звичайно апроксимують квадратичною параболою і знаходять, що постійна складова струму І0 пропорційна до квадрата амплітуди Аm високочастотного вхідного сигналу І0=к1A2m (к1 – коефіцієнт пропорційності, який залежить від параметра апроксимувальної параболи).
Якщо ж на детектор діють сигнали s достатньо великою амплітудою (Am>0,5...1B), то у цьому разі ВАХ діода апроксимують кусково-лінійною залежністю, і при тому отримують лінійну залежність постійної складової струму I0 від амплітуди Аm: I0=к2Am (к2 – коефіцієнт пропорційності, який залежить від крутості ВАХ діода та опору R низькочастотного фільтра).
Отже, детектування слабких сигналів називають квадратичним детектуванням, а детектування сильних сигналів – лінійним. Недоліком квадратичного детектування є наявність значних нелінійних спотворень, які проявляються у виникненні вищих гармонік низькочастотного модулюючого сигналу.
Лінійне детектування є бажаним режимом роботи детектора, бо у цьому разі нелінійні спотворення відсутні. Тому звичайно попередньо підсилюють АМ-сигнал, щоб досягти достатньо великої амплітуди, а відтак подають підсилений сигнал на детектор, забезпечуючи режим лінійного детектування.
На закінчення зауважимо, що як нелінійні перетворювачі у схемі амплітудного детектора можуть бути використані транзистори або ДК в нелінійному режимі роботи, що дає змогу одночасно з детектуванням АМ-сигналу підсилити продетектований сигнал.
4.5. Частотні і фазові детектори
Математична модель коливань із кутовою модуляцією має такий узагальнений вигляд:
![]() (5.40)
(5.40)
де ![]() – повна
фаза, яку при частотній модуляції описуємо виразом (1.49), а при фазовій –
виразом (1.51).
– повна
фаза, яку при частотній модуляції описуємо виразом (1.49), а при фазовій –
виразом (1.51).
Із (5.40) випливає, що ЧМ- та ФМ-сигнали мають незмінну амплітуду Аm, тому вони не можуть бути продетектовані за допомогою амплітудних детекторів, оскільки вихідна напруга таких детекторів залежить лише від амплітуди модульованих сигналів.
Детектори ЧМ-сигналів працюють на основі принципу перетворення ЧМ-сигналів на АМ-сигнали з подальшим їхнім детектуванням.
Вихідна напруга частотного детектора повинна відтворити закон зміни частоти ЧМ-сигналу стосовно частоти несучого коливання, тобто вона має бути пропорційна до відхилення миттєвого значення частоти вхідного модульованого сигналу від частоти w0 несучого коливання.
Поширений спосіб детектування ЧМ-сигналів полягає у попередньому перетворенні цих сигналів на такі, амплітуда яких змінюється пропорційно до зміни частоти, і подальшому їхньому детектуванні за допомогою амплітудного детектора.
Перетворення ЧМ-сигналів на сигнали, які змінюють амплітуду одночасно зі зміною частоти, здійснюють за допомогою т.зв. розстроєного коливального кола, використовуючи один із схилів його резонансної характеристики. Резонансна частота wр коливального кола відрізняється на деяку величину Dw від частоти w0 несучого коливання ЧМ-сигналу. У разі подання на це коло коливання несучої частоти на ньому виникає напруга, амплітуда Umк якої менша від максимально можливої. При відхиленні частоти сигналу від значення w0 одночасно змінюватиметься і амплітуда Umк напруги на коливальному колі, як показано на рис.5.30.
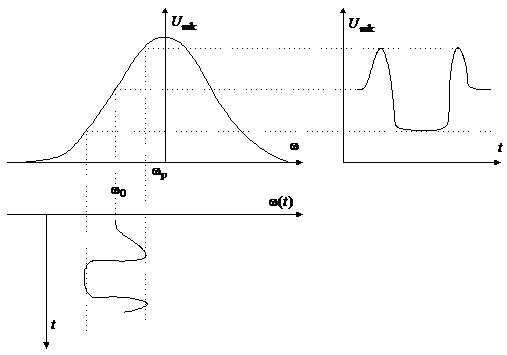
Рис.5.30. Використання розстроєного коливального кола
для перетворення ЧМ-сигналу на сигнал зі змінною амплітудою
З коливального кола знімають високочастотне коливання, одночасно модульоване за амплітудою та частотою, яке відтак подають на амплітудний детектор. Вихідна напруга детектора відтворює характер зміни амплітуди сигналу, що діє на його вході, і одночасно характер зміни частоти. На рис. 5.31 зображена найпростіша схема частотного детектора, побудованого за описаним принципом.
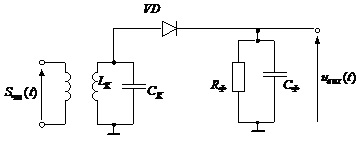
Рис.5.31. Схема частотного детектора з розстроєним коливальним колом
Елементи Lк і Ск утворюють коливальне коло, резонансна частота якого відрізняється від частоти несучого коливання, а діод VD та елементи Rф, Сф – амплітудний детектор, вихідна напруга якого Uвих(t) пропорційна до відхилення частоти вхідного ЧМ-сигналу Sчм(t) від частоти несучого коливання.
Недоліком цієї схеми є наявність нелінійних спотворень, які виникають внаслідок нелінійності схилів резонансної характеристики коливального кола. На практиці часто використовують дещо складнішу схему, яка складається з двох амплітудних детекторів із розстроєними коливальними колами, одне з яких настроєне на частоту, дещо вищу від частоти несучого коливання, а друге – на нижчу частоту. Така схема забезпечує менші нелінійні спотворення і відома під назвою дискримінатора із розстроєними коливальними колами.
Відомі інші способи побудови частотних детекторів, проте їх розгляд виходить за межі цього підручника.
Основною характеристикою частотних детекторів є характеристика детектування, яка відображає залежність вихідної напруги детектора Uвих від миттєвого значення частоти ЧМ-сигналу.
Під час детектування ФМ -сигналів їх спочатку перетворюють на ЧМ-сигнали, а потім детектують.
Один
із способів побудови фазових детекторів ФМ-коливань ґрунтується на відомому
співвідношенні між повною фазою ![]() та частотою w(t):
та частотою w(t):![]() =
= ![]() . Отже, для
детектування ФМ-коливань можна використати частотний детектор, якщо
проінтегрувати його вихідну напругу (яка відтворює закон зміни частоти вхідного
сигналу). Сказане ілюструє рис. 5.32.
. Отже, для
детектування ФМ-коливань можна використати частотний детектор, якщо
проінтегрувати його вихідну напругу (яка відтворює закон зміни частоти вхідного
сигналу). Сказане ілюструє рис. 5.32.

Рис.5.32. Детектування
ФМ-сигналів за допомогою частотного детектора
Раніше було сказано, що на практиці кутову модуляцію супроводжує паразитна амплітудна модуляція, що може призводити до похибок при детектуванні ЧМ-сигналів. Для усунення таких похибок перед частотними та фазовими детекторами вмикають обмежувач, який забезпечує стабільність амплітуди вхідного модульованого сигналу.
5. Генерування гармонічних сигналів
У генераторах здійснюється перетворення енергії
постійного струму на енергію періодичних коливань.
5.1. Основні поняття про принципи побудови автогенераторів
Функцію генерування коливань реалізують автогенератори – електронні кола, в яких виникають та як завгодно довго існують періодичні електричні коливання.
У генераторах здійснюється перетворення енергії постійного струму на енергію періодичних коливань.
Коливання, що виникають в автогенераторах, називають автоколиваннями. Звичайно автогенератори є малопотужними колами, основне призначення яких полягає у генеруванні коливань з високою стабільністю частоти.
Виникнення та існування усталених автоколивань у автогенераторі неодмінно пов’язане з перетворенням певного виду енергії на енергію електричних коливань заданої частоти. Залежно від способу перетворення енергії розрізняють два типи автогенераторів:
1) автогенератори, в яких здійснюється перетворення енергії постійного струму на енергію коливань певної форми та частоти. Цей тип автогенераторів поділяють на дві групи: а) генератори гармонічних коливань, форма коливань яких близька до гармонічної; б) генератори релаксаційних (розривних) коливань, які мають різкі стрибки струмів та напруг або їхніх похідних;
2) автогенератори параметричного типу, в яких хоча б один із параметрів елементів схеми змінюється у часі за періодичним законом під зовнішньою дією (механічною, електричною тощо). У цих автогенераторах енергія коливань зовнішньої дії перетворюється на енергію електричних коливань заданої частоти, причому частота коливань зовнішньої дії у загальному випадку не збігається з частотою коливань автогенератора.
Тут розглянемо лише автогенератори гармонічних коливань.
Більшість автогенераторів можна подати узагальненою структурною схемою у вигляді чотириполюсника (підсилювача) К, охопленого додатним зворотним зв’язком через чотириполюсник b (рис.5.33).
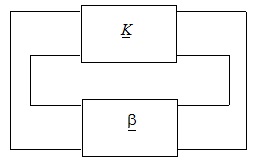
Рис. 5.33. Узагальнена структурна схема автогенератора
Раніше було показано, що загалом за наявності зворотного зв’язку комплексний коефіцієнт підсилення підсилювача описує формула:
![]() . (5.41)
. (5.41)
У разі додатного зворотного зв’язку добуток b К є величиною дійсною і додатною, тобто
b К=Кbexp[j(фк+фb)]>0, (5.42)
де К, β – відповідно модуль коефіцієнта підсилення підсилювача та коефіцієнта передавання напруги чотириполюсника зворотного зв’язку; φк,φb – фазові зсуви, що вносять відповідно підсилювач та чотириполюсник зворотного зв’язку.
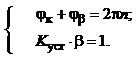
Із (5.42) випливає, що у схемі автогенератора повинна виконуватись т. зв. умова балансу фаз:
φк+φb=2πn (n=0, 1, 2, ..). (5.43)
Робота автогенератора ґрунтується на реалізації у підсилювачі додатного зворотного зв’язку.
Проте лише цієї умови недостатньо для самозбудження автогенератора. Автогенератор самозбудиться, якщо хоча б для однієї частоти буде одночасно з (5.43) виконана умова:
Кb>1. (5.44)
Отже, одночасне виконання співвідношень (5.43) та (5.44) для однієї і тієї самої частоти є умовою самозбудження автогенератора, яка свідчить про наростання коливань у схемі.
Аналіз показує, що К-чотириполюсник та b-чотириполюсник повинні мати такі властивості:
1) К-чотириполюсник повинен мати нелінійні властивості: його коефіцієнт підсилення К має залежати від величини амплітуди так, щоб зі збільшенням амплітуди коливань значення К зменшувалось. За цієї умови у схемі можливе встановлення коливань із незмінною амплітудою. Якщо б коефіцієнт підсилення К був незмінним, то згідно з (5.44) амплітуда коливань наростала б до нескінченності.
2) Оскільки автогенератор генерує гармонічні коливання (тобто коливання одної частоти), то це означає, що b-чотириполюсник повинен бути частотовибірним і забезпечувати баланс фаз лише для коливань однієї частоти, а коливання усіх інших частот – придушувати.
В усталеному режимі гармонічних коливань в автогенераторі одночасно виконуються умови балансу фаз та балансу амплітуд:
Залежно від схемної реалізації автогенератори гармонічних коливань поділяють на LC-автогенератори та RC-автогенератори.
5.2. LC-автогенератори
Більшість LC-автогенераторів будують за т. зв. триточковою схемою, яка являє собою інвертуючий підсилювач (φк=±π), охоплений чотириполюсником зворотного зв’язку (рис. 5.34, а). Ця сама схема показана у триточковому зображенні на рис. 5.34, б.

Рис.5.34. Узагальнена схема LC-генератора: а – у вигляді
підсилювача, охопленого зворотним зв’язком;
б – у вигляді триточкової схеми
Чотириполюсник зворотного зв’язку складається з елементів типу L і С, і фактично являє собою коливальне коло. Нехтуючи втратами згаданих елементів, приймемо, що опори елементів Z1, Z2, Z3 є суто реактивними: Z1=jX1; Z2=jX2; Z3=jX3.
На резонансній частоті w0 сума усіх реактивних опорів дорівнює нулеві:
Х10+Х20+Х30=0. (5.46)
Оскільки підсилювач є інвертуючим (K`=Kexp(jπ)<0), то для забезпечення умови балансу фаз (5.43) необхідно, щоб коефіцієнт передавання напруги чотириполюсника зворотного зв’язку теж був від’ємною дійсною величиною:
![]() (5.47)
(5.47)
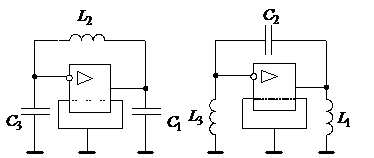
Умова (5.47) може бути виконана, якщо Х20/Х30<0, причому ½Х20½>½Х30½. З урахуванням (5.46) приходимо до висновку, що елементи Z1 та Z3 повинні мати реактивні опори однакового знака, протилежного до знака реактивного опору елемента Z2. Отже, можливі два варіанти побудови триточкових схем LC-автогенераторів: ємнісна триточка (рис. 5.35, а) та індуктивна триточка (рис. 5.35, б)
|
а |
б |
Рис.5.35. Варіанти триточкових схем автогенераторів:
а – ємнісна триточка; б – індуктивна триточка
У LC - генераторі частоту генерації задає певний LC - контур.
Частота генерованих коливань в обох варіантах схеми дорівнює резонансній частоті w0 коливального кола. Отже, у разі ємнісної триточки вона визначається за формулою:
![]() (5.48)
(5.48)
а у разі індуктивної триточки:
![]() (5.49)
(5.49)
Для забезпечення самозбудження автогенераторів модуль коефіцієнта підсилення підсилювача повинен задовольняти умови відповідно для ємнісної та індуктивної триточок: КC >С3/C1; KL>L1/L3
Обмеження наростання амплітуди LС-автогенераторів зумовлене нелінійністю вольтамперних характеристик підсилювальних елементів – транзисторів, які, з одного боку, відсікають струм, а з іншого – обмежують його за рахунок насичення. Отже, в усталеному режимі автогенератора транзистори завжди працюють у нелінійному режимі, в якому виникають вищі гармоніки струму (друга, третя і т.д.). Проте наявність у схемі автогенератора високодобротного коливального кола забезпечує виділення основної гармоніки струму, частота якої дорівнює резонансній частоті коливального кола, і придушення вищих гармонік. Тим самим забезпечується форма коливань, близька до гармонічної.
Забезпечити високу стабільність частоти автогенератора можна, застосовуючи високодобротні коливальні системи зі стабільною резонансною частотою. Звичайні LC-коливальні кола не можуть задовольнити високих вимог стосовно стабільності частоти. Допустима відносна нестабільність частоти для сучасних передавальних пристроїв становить 10-5...10-7. Такі вимоги задовольняють коливальні системи, виготовлені з матеріалів, які проявляють п’єзоелектричні властивості, наприклад, із кварцу. Добротність серійних кварцових резонаторів становить десятки-сотні тисяч, а у прецизійних кварців сягає навіть декількох мільйонів. У кварцовому резонаторі пластина кварцу розміщена між двома металевими обкладками. Під дією високочастотної напруги, прикладеної до металевих пластинок, у кварцовій пластині виникають пружні механічні коливання. Частота цих коливань визначається геометричними розмірами кварцової пластини та видом зрізу. Звичайно використовують кварцові пластини на частотах 50 – 500 кГц, але не вище 15 – 30 МГц.
Перелічені властивості кварцових резонаторів дають змогу застосовувати їх у схемах автогенераторів для стабілізації частоти. Кварц використовують як індуктивний опір і вмикають його у схему автогенератора замість однієї із індуктивностей (див. рис. 5.36).
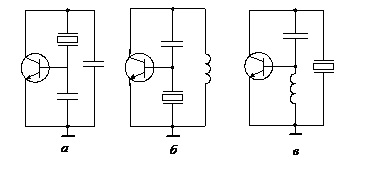
Рис.5.36. Триточкові схеми автогенераторів
із
кварцовою стабілізацією частоти:а – ємнісна триточка;
б,в – індуктивні триточки
5.3. RC-автогенератори
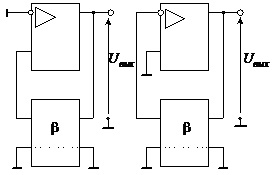
Під час побудови RC-автогенераторів найчастіше як підсилювальний елемент використовують операційний підсилювач (ОП) який має два входи: неінвертуючий (jк=0) та інвертуючий (jк=p). Чотириполюсник зворотного зв’язку b вмикають між виходом ОП та одним із входів залежно від того, який зсув jb він може забезпечити на частоті генерування автогенератора.
Наприклад, якщо на частоті генерування wг фазовий зсув jb=2pn, то зворотний зв’язок подають на неінвертуючий вхід ОП, як показано на рис 5.37, а. Якщо ж jb=(2n+1)p, то зворотний зв’язок подають на інвертуючий вхід ОП, як показано на рис. 5.37, б.
|
а |
б |
Рис. 5.37. Способи побудови RC-автогенераторів на ОП:
а – якщо φβ=00; б – якщо φβ=1800
Найчастіше як чотириполюсник зворотного зв’язку використовують міст Віна (рис. 5.38а) та триланкову RC-схему (рис. 5.38б).
У RC-генераторах умова балансу фаз виконується за допомогою RC- чотириполюсника, який здійснює зсув фаз сигналу у ланці зворотного зв’язку.
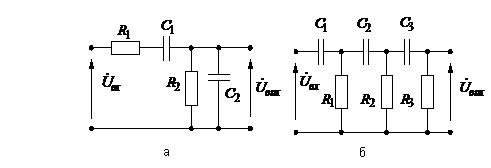
Рис.5.38. Варіанти чотириполюсників зворотного зв’язку
RC-автогенераторів:а – міст Віна;
б – триланкова RC- схема
Міст Віна звичайно вибирають з однаковими значеннями параметрів відповідно R- і С- елементів, тобто R1=R2=R; C1=C2=C. У такому разі комплексний коефіцієнт передавання напруги описує формула:
![]() (5.50)
(5.50)
Прирівнявши до нуля уявну частину знаменника у (5.50), визначаємо частоту w0=1/RC, на якій модуль коефіцієнта передавання стає дійсним додатним числом b0=1/3. Отже, міст Віна забезпечує генерування коливань з частотою wг=w0=1/RC за умови, що на цій частоті ОП забезпечить коефіцієнт підсилення К0>3, щоб виконати умову самозбудження (5.44). У такому разі автогенератор будують за схемою, показаною на рис. 5.37, а.
У триланковій RC-схемі звичайно вибирають R1=R2=R; C1=C2=C. Комплексний коефіцієнт передавання напруги описує формула:
![]() (5.51)
(5.51)
Діючи
аналогічно, як і в в попередньому випадку, знаходимо, що на частоті ![]() коефіцієнт β стає від’ємним числом β0=-1/29, тобто фазовий зсув φβ=1800.
коефіцієнт β стає від’ємним числом β0=-1/29, тобто фазовий зсув φβ=1800.
Отже,
автогенератор будують за схемою, показаною на рис. 5.37, б, причому ОП має
забезпечити коефіцієнт підсилення К0>29,
щоб виконати умову самозбудження на частоті ωг=![]() .
.
Можливі також інші варіанти вибору чотириполюсників зворотного зв’язку. Із наведених прикладів випливає, що частота коливань RC-автогенераторів обернено пропорційна до значень параметрів R і С елементів схеми. Малогабаритні резистори та конденсатори можуть мати великі номінальні значення параметрів, тому RC-автогенератори доцільно застосовувати для генерування низькочастотних коливань, причому нижня межа частотного діагнозу може сягати значень, менших за 1 Гц. Верхня межа частотного діапазону обмежується значеннями паразитних ємностей, а також мінімальними значеннями опорів резисторів, за яких допустимі струми підсилювальних елементів ще можуть забезпечити напруги потрібних амплітуд. Практично RC-автогенератори можуть генерувати коливання з частотами, які сягають значень сотень кілогерц.
RC-чотириполюсники зворотного зв’язку мають невисоку частотну вибірковість, тому підсилювальний елемент у схемі RC-автогенератора повинен працювати практично в лінійному режимі, щоб не допускати значних нелінійних спотворень. Це означає, що обмеження зростання амплітуди коливань автогенератора під час самозбудження повинно здійснюватись не за рахунок нелінійності амплітудної характеристики підсилювача, а іншими способами. Схему RC-автогенератора будують так, щоб обмеження амплітуди здійснювалось у колі зворотного зв’язку. Для цього в коло зворотного зв’язку вмикають елемент, параметри якого залежать від амплітудних значень струму, а саме теплоінерційний елемент. Такими елементами є терморезистори, лампи розжарювання тощо. Оскільки завдяки значній теплоінерційності опір цих елементів у межах одного періоду коливань залишається незмінним, то вони не спотворюють форми гармонічного струму і тому вищі гармоніки практично відсутні. У сучасних RC-автогенераторах найчастіше застосовують напівпровідникові терморезистори, опір яких із зростанням амплітуди прикладеної до них напруги зменшується.
На рис. 5.39 показано один з найпростіших способів стабілізації амплітуди за допомогою терморезистора Rт, який увімкнутий в коло від’ємного зворотного зв’язку. У разі збільшення амплітуди коливань автогенератора опір терморезистора зменшується, внаслідок чого від’ємний зворотний зв’язок посилюється і амплітуда коливань повертається до попереднього значення.
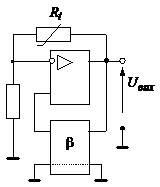
Рис.5.39. Стабілізація амплітуди коливань RC-
автогенератора за
допомогою терморезистора
Для стабілізації амплітуди RC-автогенераторів застосовують також світлодіоди, опір яких зменшується зі збільшенням амплітуди коливань, або стабілітрони, які забезпечують обмеження амплітуди на рівні напруги стабілізації.