Тема 8. Перетворення сигналів в електронних колах
2. Частотна фільтрація електричних сигналів
2.1. Пасивні фільтри
Оскільки основне завдання електричного фільтра полягає у тому, щоб пропустити сигнали з мінімальними втратами у смузі пропускання, то для побудови пасивних фільтрів використовують L- і С- елементи з малими втратами, якими практично можна знехтувати. Тому такого типу фільтри називають реактивними фільтрами.
Умова прозорості реактивного фільтра передбачає відсутність послаблення сигналу у смузі пропускання фільтра.
Елементарною ланкою пасивного реактивного фільтра є Г-ланка (рис. 5.2, а), аналіз властивостей якої показує, що вона може пропускати сигнали без послаблення у певній смузі частот, в якій реактивні опори її елементів задовольняють умову:
-1 £ Хh/Хv £ 0. (5.5)
Співвідношення (5.5) називають умовою прозорості фільтра.
Із (5.5) випливає, що для виконання умови прозорості необхідно, щоб реактивні опори Хh та Хv мали різні знаки.
Частоти зрізу, які відповідають границям смуги пропускання, визначають співвідношення:
Хh/Хv=0; (5.6а)
Хh/Хv=-1. (5.6б)
Схеми елементарних Г-ланок ФНЧ, ФВЧ, СФ та ЗФ зображено відповідно на рис. 5.2, б, в, г, д.
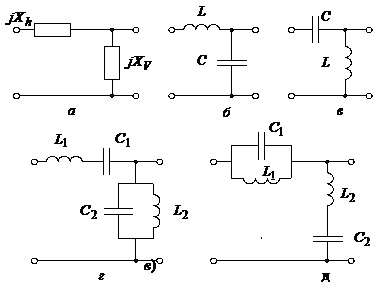
Рис.5.2. Ланки реактивних фільтрів: а – узагальнена схема;
б – ФНЧ; в – ФВЧ; г – СФ; д – ЗФ
Зауважимо, що добуток реактивних опорів горизонтального та вертикального плечей Г-ланки є величиною сталою, тобто Хh×Хv=К2, де К – довільне число. Тому такі фільтри називають фільтрами типу К.
Перевагою фільтрів типу К є простота їхньої схеми, проте їхні амплітудно-частотні характеристики мають надто пологі схили і тому не забезпечують чіткої межі між смугою пропускання та смугою запирання. Вхідний та вихідний опори таких фільтрів істотно залежать від частоти, що не дає змогу забезпечити умови узгодження з резистивним опором навантаження та з резистивним опором генератора сигналу.
Крім того, оскільки реальні конденсатори та індуктивні котушки мають певні втрати, то у смузі пропускання сигнали теж зазнають певного послаблення.
Внаслідок цього амплітудно-частотні характеристики реальних фільтрів типу К істотно відрізняються від характеристик ідеальних фільтрів, зображених на рис. 5.1.
Недоліки фільтрів типу К значною мірою усуваються у фільтрах типу m.
Принцип побудови фільтрів типу m полягає у перерозподілі реактивних опорів у горизонтальних та вертикальних гілках фільтрів типу К, які називають прототипами. У результаті отримують два варіанти фільтрів типу m: послідовно-похідні та паралельно-похідні (див. рис. 5.3).
Фільтри типу m усувають недоліки, наявні у фільтрів типу К. Їх будують, модифікуючи схеми прототипів – фільтрів типу К.
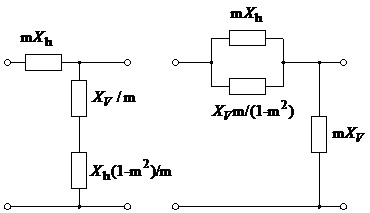
Рис. 5.3. Фільтри типу m: а – послідовно-похідний; б – паралельно-похідний
Характеристики фільтрів типу m істотно залежать від вибору значення коефіцієнта m, який може набувати значення від 0 до 1. Зауважимо, що при m=1 фільтр типу m перетвориться на фільтр типу К.
Фільтри типу m забезпечують чіткіше розділення смуг пропускання та запирання, а також практично стале значення вхідного і вихідного опорів, що полегшує умови узгодження.
На закінчення зауважимо, що пасивні реактивні фільтри широко застосовуються для фільтрації сигналів у діапазоні високих частот (вищих від 100 кГц), де значення індуктивностей є порівняно невеликими і їхні габарити теж невеликі, тому фільтри конструктивно виготовляють компактними, зручними для практичного застосування.